This example has been auto-generated from the examples/ folder at GitHub repository.
Global Parameter Optimisation
This notebook demonstrates how to optimize parameters in state space models using external optimization packages, such as Optim.jl and Flux.jl. We utilize RxInfer.jl, a powerful package for inference in probabilistic models.
By the end of this notebook, you will have practical knowledge of global parameter optimization in state space models. You will learn how to optimize parameters in both univariate and multivariate state space models, and harness the power of external optimization packages such as Optim.jl and Flux.jl.
# Activate local environment, see `Project.toml`
import Pkg; Pkg.activate(".."); Pkg.instantiate();Univariate State Space Model
Let us try use the following simple state space model:
\[\begin{aligned} {x}_t &= {x}_{t-1} + c \\ {y}_t &\sim \mathcal{N}\left({x}_{t}, p \right) \end{aligned}\]
with prior ${x}_0 \sim \mathcal{N}({m_{{x}_0}}, {v_{{x}_0}})$. Our goal is to optimize parameters $c$ and ${m_{{x}_0}}$.
using RxInfer, BenchmarkTools, Random, LinearAlgebra, Plots@model function smoothing(y, x0, c, P)
x_prior ~ Normal(mean = mean(x0), var = var(x0))
x_prev = x_prior
for i in eachindex(y)
x[i] ~ x_prev + c
y[i] ~ Normal(mean = x[i], var = P)
x_prev = x[i]
end
endrng = MersenneTwister(42)
P = 1.0
n = 250
c_real = -5.0
data = c_real .+ collect(1:n) + rand(rng, Normal(0.0, sqrt(P)), n);# c[1] is C
# c[2] is μ0
function f(c)
x0_prior = NormalMeanVariance(c[2], 100.0)
result = infer(
model = smoothing(x0 = x0_prior, c = c[1], P = P),
data = (y = data,),
free_energy = true
)
return result.free_energy[end]
endf (generic function with 1 method)using Optimres = optimize(f, ones(2), GradientDescent(), Optim.Options(g_tol = 1e-3, iterations = 100, store_trace = true, show_trace = true, show_every = 10))Iter Function value Gradient norm
0 3.651509e+02 1.001412e+03
* time: 0.0253450870513916
* Status: success
* Candidate solution
Final objective value: 3.645772e+02
* Found with
Algorithm: Gradient Descent
* Convergence measures
|x - x'| = 1.18e-06 ≰ 0.0e+00
|x - x'|/|x'| = 2.30e-07 ≰ 0.0e+00
|f(x) - f(x')| = 9.13e-07 ≰ 0.0e+00
|f(x) - f(x')|/|f(x')| = 2.51e-09 ≰ 0.0e+00
|g(x)| = 2.56e-06 ≤ 1.0e-03
* Work counters
Seconds run: 16 (vs limit Inf)
Iterations: 9
f(x) calls: 67
∇f(x) calls: 67res.minimizer # Real values are indeed (c = 1.0 and μ0 = -5.0)2-element Vector{Float64}:
1.0007749243942134
-5.14368311177876println("Real value vs Optimized")
println("Real: ", [ 1.0, c_real ])
println("Optimized: ", res.minimizer)Real value vs Optimized
Real: [1.0, -5.0]
Optimized: [1.0007749243942134, -5.14368311177876]Multivariate state space model
Let us consider the multivariate state space model:
\[\begin{aligned} \mathbf{x}_t &\sim \mathcal{N}\left(\mathbf{Ax}_{t-1}, \mathbf{Q} \right) \\ \mathbf{y}_t &\sim \mathcal{N}\left(\mathbf{x}_{t}, \mathbf{P} \right) \end{aligned}\]
with prior
\[\begin{aligned} \mathbf{x}_0 \sim \mathcal{N}(\mathbf{m_{{x}_0}}, \mathbf{V_{{x}_0}})\ \end{aligned}\]
and transition matrix
\[\begin{aligned} \mathbf{A} = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} \end{aligned}\]
Covariance matrices $\mathbf{V_{{x}_0}}$, $\mathbf{P}$ and $\mathbf{Q}$ are known. Our goal is to optimize parameters $\mathbf{m_{{x}_0}}$ and $\theta$.
using RxInfer, BenchmarkTools, Random, LinearAlgebra, Plots@model function rotate_ssm(y, θ, x0, Q, P)
x_prior ~ MvNormal(mean = mean(x0), cov = cov(x0))
x_prev = x_prior
A = [ cos(θ) -sin(θ); sin(θ) cos(θ) ]
for i in eachindex(y)
x[i] ~ MvNormal(mean = A * x_prev, covariance = Q)
y[i] ~ MvNormal(mean = x[i], covariance = P)
x_prev = x[i]
end
end# Generate data
function generate_rotate_ssm_data()
rng = MersenneTwister(1234)
θ = π / 8
A = [ cos(θ) -sin(θ); sin(θ) cos(θ) ]
Q = Matrix(Diagonal(1.0 * ones(2)))
P = Matrix(Diagonal(1.0 * ones(2)))
n = 300
x_prev = [ 10.0, -10.0 ]
x = Vector{Vector{Float64}}(undef, n)
y = Vector{Vector{Float64}}(undef, n)
for i in 1:n
x[i] = rand(rng, MvNormal(A * x_prev, Q))
y[i] = rand(rng, MvNormal(x[i], Q))
x_prev = x[i]
end
return θ, A, Q, P, n, x, y
endgenerate_rotate_ssm_data (generic function with 1 method)θ, A, Q, P, n, x, y = generate_rotate_ssm_data();px = plot()
px = plot!(px, getindex.(x, 1), ribbon = diag(Q)[1] .|> sqrt, fillalpha = 0.2, label = "real₁")
px = plot!(px, getindex.(x, 2), ribbon = diag(Q)[2] .|> sqrt, fillalpha = 0.2, label = "real₂")
plot(px, size = (1200, 450))
function f(θ)
x0 = MvNormalMeanCovariance([ θ[2], θ[3] ], Matrix(Diagonal(0.01 * ones(2))))
result = infer(
model = rotate_ssm(θ = θ[1], x0 = x0, Q = Q, P = P),
data = (y = y,),
free_energy = true
)
return result.free_energy[end]
endf (generic function with 1 method)res = optimize(f, zeros(3), LBFGS(), Optim.Options(f_tol = 1e-14, g_tol = 1e-12, show_trace = true, show_every = 10))Iter Function value Gradient norm
0 2.192003e+04 9.032537e+04
* time: 7.510185241699219e-5
* Status: success (objective increased between iterations)
* Candidate solution
Final objective value: 1.161372e+03
* Found with
Algorithm: L-BFGS
* Convergence measures
|x - x'| = 2.94e-09 ≰ 0.0e+00
|x - x'|/|x'| = 2.59e-10 ≰ 0.0e+00
|f(x) - f(x')| = 6.82e-13 ≰ 0.0e+00
|f(x) - f(x')|/|f(x')| = 5.87e-16 ≤ 1.0e-14
|g(x)| = 9.39e-08 ≰ 1.0e-12
* Work counters
Seconds run: 46 (vs limit Inf)
Iterations: 9
f(x) calls: 58
∇f(x) calls: 58println("Real value vs Optimized")
println("Real: ", θ)
println("Optimized: ", res.minimizer[1])
@show sin(θ), sin(res.minimizer[1])
@show cos(θ), cos(res.minimizer[1])Real value vs Optimized
Real: 0.39269908169872414
Optimized: 0.39293324813955327
(sin(θ), sin(res.minimizer[1])) = (0.3826834323650898, 0.382899763452979)
(cos(θ), cos(res.minimizer[1])) = (0.9238795325112867, 0.9237898955648155)
(0.9238795325112867, 0.9237898955648155)x0 = MvNormalMeanCovariance([ res.minimizer[2], res.minimizer[3] ], Matrix(Diagonal(100.0 * ones(2))))
result = infer(
model = rotate_ssm(θ = res.minimizer[1], x0 = x0, Q = Q, P = P),
data = (y = y,),
free_energy = true
)
xmarginals = result.posteriors[:x]
px = plot()
px = plot!(px, getindex.(x, 1), ribbon = diag(Q)[1] .|> sqrt, fillalpha = 0.2, label = "real₁")
px = plot!(px, getindex.(x, 2), ribbon = diag(Q)[2] .|> sqrt, fillalpha = 0.2, label = "real₂")
px = plot!(px, getindex.(mean.(xmarginals), 1), ribbon = getindex.(var.(xmarginals), 1) .|> sqrt, fillalpha = 0.5, label = "inf₁")
px = plot!(px, getindex.(mean.(xmarginals), 2), ribbon = getindex.(var.(xmarginals), 2) .|> sqrt, fillalpha = 0.5, label = "inf₂")
plot(px, size = (1200, 450))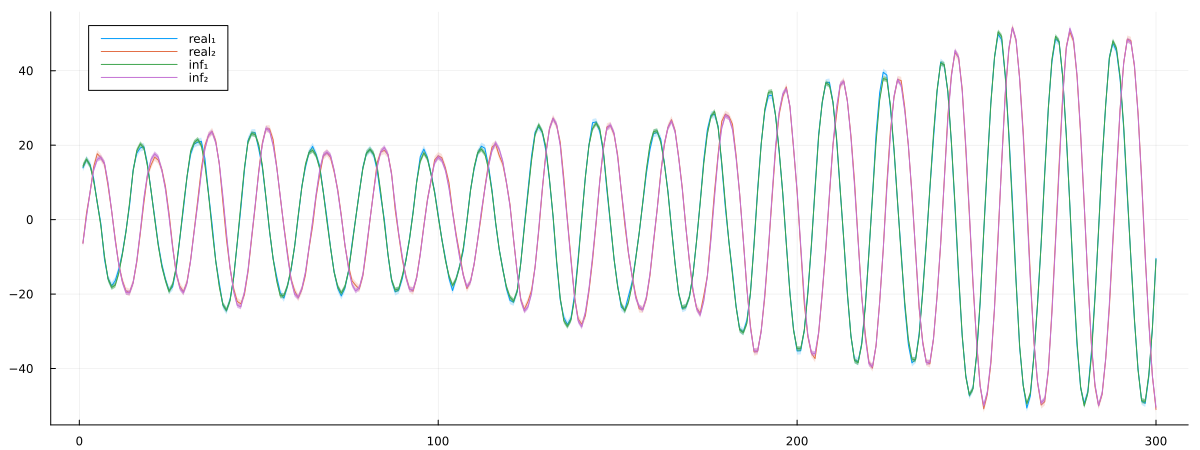
Learning Kalman filter with LSTM driven dynamic
In this example, our focus is on Bayesian state estimation in a Nonlinear State-Space Model. Specifically, we will utilize the time series generated by the Lorenz system as an example.
Our objective is to compute the marginal posterior distribution of the latent (hidden) state $x_k$ at each time step $k$, considering the history of measurements up to that time step:
\[ p(x_k | y_{1:k}). $$ The above expression represents the probability distribution of the latent state $x_k$ given the measurements $y_{1:k}$ up to time step $k$. ```julia using RxInfer, BenchmarkTools, Flux, ReverseDiff, Random, Plots, LinearAlgebra, ProgressMeter, JLD, StableRNGs ``` ### Generate data ```julia # Lorenz system equations to be used to generate dataset Base.@kwdef mutable struct Lorenz dt::Float64 σ::Float64 ρ::Float64 β::Float64 x::Float64 y::Float64 z::Float64 end function step!(l::Lorenz) dx = l.σ * (l.y - l.x); l.x += l.dt * dx dy = l.x * (l.ρ - l.z) - l.y; l.y += l.dt * dy dz = l.x * l.y - l.β * l.z; l.z += l.dt * dz end ; ``` ```julia # Dataset rng = StableRNG(999) ordered_dataset = [] ordered_parameters = [] for σ = 11:15 for ρ = 23:27 for β_nom = 6:9 attractor = Lorenz(0.02, σ, ρ, β_nom/3.0, 1, 1, 1) noise_free_data = [[1.0, 1.0, 1.0]] for i=1:99 step!(attractor) push!(noise_free_data, [attractor.x, attractor.y, attractor.z]) end push!(ordered_dataset, noise_free_data) push!(ordered_parameters, [σ, ρ, β_nom/3.0]) end end end new_order = collect(1:100) shuffle!(rng,new_order) dataset = [] # noisy dataset noise_free_dataset = [] # noise free dataset lorenz_parameters = [] for i in new_order local data = [] push!(noise_free_dataset, ordered_dataset[i]) push!(lorenz_parameters, ordered_parameters[i]) for nfd in ordered_dataset[i] push!(data,nfd+randn(rng,3)) end push!(dataset, data) end trainset = dataset[1:60] validset = dataset[61:80] testset = dataset[81:end] noise_free_trainset = noise_free_dataset[1:60] noise_free_validset = noise_free_dataset[61:80] noise_free_testset = noise_free_dataset[81:end] ; ``` ### Data visualization ```julia one_nonoise=noise_free_trainset[1] one=trainset[1] gx, gy, gz = zeros(100), zeros(100), zeros(100) rx, ry, rz = zeros(100), zeros(100), zeros(100) for i=1:100 rx[i], ry[i], rz[i] = one[i][1], one[i][2], one[i][3] gx[i], gy[i], gz[i] = one_nonoise[i][1], one_nonoise[i][2], one_nonoise[i][3] end p1=plot(rx,ry,label="Noise observations") p1=plot!(gx,gy,label="True state") xlabel!("x") ylabel!("y") p2=plot(rx,rz,label="Noise observations") p2=plot!(gx,gz,label="True state") xlabel!("x") ylabel!("z") p3=plot(ry,rz,label="Noise observations") p3=plot!(gy,gz,label="True state") xlabel!("y") ylabel!("z") plot(p1, p2, p3, size = (800, 200),layout=(1,3)) ```  ### Inference We use the following state-space model representation: $$\begin{aligned} x_k \sim p(x_k | x_{k-1}) \\ y_k \sim p(y_k | x_k). \end{aligned}\]
where $x_k \sim p(x_k | x_{k-1})$ represents the hidden dynamics of our system. The hidden dynamics of the Lorenz system exhibit nonlinearities and hence cannot be solved in the closed form. One manner of solving this problem is by introducing a neural network to approximate the transition matrix of the Lorenz system.
\[\begin{aligned} A_{k-1}=NN(y_{k-1}) \\ p(x_k | x_{k-1})=\mathcal{N}(x_k | A_{k-1}x_{k-1}, Q) \\ p(y_k | x_k)=\mathcal{N}(y_k | Bx_k, R) \end{aligned}\]
where $NN$ is the neural network. The input is the observation $y_{k-1}$, and output is the trasition matrix $A_{k-1}$. $B$ denote distortion or measurment matrix. $Q$ and $R$ are covariance matrices. Note that the hidden state $x_k$ comprises three coordinates, i.e. $x_k = (rx_k, ry_k, rz_k)$
By employing this state-space model representation and utilizing the neural network approximation, we can estimate the hidden dynamics and perform inference in the Lorenz system.
# Neural Network model
mutable struct NN
InputLayer
OutputLater
g
params
function NN(W1,b1,W2_1,W2_2,b2,s2_1,W3,b3)
InputLayer = Dense(W1, b1, relu)
Lstm = LSTM(W2_1,W2_2,b2,s2_1)
OutputLayer = Dense(W3, b3)
g = Chain(InputLayer, OutputLayer);
new(InputLayer, OutputLayer, g, (W1,b1,W2_1,W2_2,b2,s2_1,W3,b3))
end
endModel specification
Note that we treat the trasition matrix $A_{k-1}$ as time-varying.
#State Space Model
@model function ssm(y, As, Q, B, R)
x_prior_mean = zeros(3)
x_prior_cov = Matrix(Diagonal(ones(3)))
x[1] ~ MvNormal(mean = x_prior_mean, cov = x_prior_cov)
y[1] ~ MvNormal(mean = B * x[1], cov = R)
for i in 2:length(y)
x[i] ~ MvNormal(mean = As[i - 1] * x[i - 1], cov = Q)
y[i] ~ MvNormal(mean = B * x[i], cov = R)
end
endWe set distortion matrix $B$ and the covariance matrices $Q$ and $R$ as identity matrix.
Q = Matrix(Diagonal(ones(3)))*2
B = Matrix(Diagonal(ones(3)))
R = Matrix(Diagonal(ones(3)))
;We use the inference function in the RxInfer.jl. Before that, we need to bulid a function to get the matrix $A$ output by the neural network. And the $A$ is treated as a datavar in the inference function.
function get_matrix_AS(data,W1,b1,W2_1,W2_2,b2,s2_1,W3,b3)
n = length(data)
neural = NN(W1,b1,W2_1,W2_2,b2,s2_1,W3,b3)
Flux.reset!(neural)
As = map((d) -> Matrix(Diagonal(neural.g(d))), data[1:end-1])
return As
endget_matrix_AS (generic function with 1 method)The weights of neural network $NN$ are initialized as follows:
# Initial model parameters
W1, b1 = randn(5, 3)./100, randn(5)./100
W2_1, W2_2, b2, s2_1, s2_2 = randn(5 * 4, 5) ./ 100, randn(5 * 4, 5) ./ 100, randn(5*4) ./ 100, zeros(5), zeros(5)
W3, b3 = randn(3, 5) ./ 100, randn(3) ./ 100
;Before network training, we show the inference results for the hidden states:
# Performance on an instance from the testset before training
index = 1
data=testset[index]
n=length(data)
result = infer(
model = ssm(As = get_matrix_AS(data,W1,b1,W2_1,W2_2,b2,s2_1,W3,b3),Q = Q,B = B,R = R),
data = (y = data, ),
returnvars = (x = KeepLast(), ),
free_energy = true
)
x_est=result.posteriors[:x]
rx, ry, rz = zeros(100), zeros(100), zeros(100)
rx_est_m, ry_est_m, rz_est_m = zeros(100), zeros(100), zeros(100)
rx_est_var, ry_est_var, rz_est_var = zeros(100), zeros(100), zeros(100)
for i=1:100
rx[i], ry[i], rz[i] = testset[index][i][1], testset[index][i][2], testset[index][i][3]
rx_est_m[i], ry_est_m[i], rz_est_m[i] = mean(x_est[i])[1], mean(x_est[i])[2], mean(x_est[i])[3]
rx_est_var[i], ry_est_var[i], rz_est_var[i] = var(x_est[i])[1], var(x_est[i])[2], var(x_est[i])[3]
end
p1 = plot(rx,label="Hidden state rx")
p1 = plot!(rx_est_m,label="Inferred states", ribbon=rx_est_var)
p1 = scatter!(first.(testset[index]), label="Observations", markersize=1.0)
p2 = plot(ry,label="Hidden state ry")
p2 = plot!(ry_est_m,label="Inferred states", ribbon=ry_est_var)
p2 = scatter!(getindex.(testset[index], 2), label="Observations", markersize=1.0)
p3 = plot(rz,label="Hidden state rz")
p3 = plot!(rz_est_m,label="Inferred states", ribbon=rz_est_var)
p3 = scatter!(last.(testset[index]), label="Observations", markersize=1.0)
plot(p1, p2, p3, size = (1000, 300))
Training network
In this part, we use the Free Energy as the objective function to optimize the weights of network.
# free energy objective to be optimized during training
function fe_tot_est(W1,b1,W2_1,W2_2,b2,s2_1,W3,b3)
fe_ = 0
for train_instance in trainset
result = infer(
model = ssm(n, get_matrix_AS(train_instance,W1,b1,W2_1,W2_2,b2,s2_1,W3,b3),Q,B,R),
data = (y = train_instance, ),
returnvars = (x = KeepLast(), ),
free_energy = true
)
fe_ += result.free_energy[end]
end
return fe_
endfe_tot_est (generic function with 1 method)Training
# Training is a computationally expensive procedure, for the sake of an example we load pre-trained weights
# Uncomment the following code to train the network manually
# opt = Flux.Optimise.RMSProp(0.006, 0.95)
# params = (W1,b1,W2_1,W2_2,b2,s2_1,W3,b3)
# @showprogress for epoch in 1:800
# grads = ReverseDiff.gradient(fe_tot_est, params);
# for i=1:length(params)
# Flux.Optimise.update!(opt,params[i],grads[i])
# end
# endTest
Import the weights of neural network that we have trained.
W1a, b1a, W2_1a, W2_2a, b2a, s2_1a, W3, b3a = load("../data/nn_prediction/weights.jld")["data"];# Performance on an instance from the testset after training
index = 1
data = testset[index]
n = length(data)
result = infer(
model = ssm(As=get_matrix_AS(data,W1a,b1a,W2_1a,W2_2a,b2a,s2_1a,W3,b3a),Q=Q,B=B,R=R),
data = (y = data, ),
returnvars = (x = KeepLast(), ),
free_energy = true
)
x_est=result.posteriors[:x]
gx, gy, gz = zeros(100), zeros(100), zeros(100)
rx, ry, rz = zeros(100), zeros(100), zeros(100)
rx_est_m, ry_est_m, rz_est_m = zeros(100), zeros(100), zeros(100)
rx_est_var, ry_est_var, rz_est_var = zeros(100), zeros(100), zeros(100)
for i=1:100
gx[i], gy[i], gz[i] = noise_free_testset[index][i][1], noise_free_testset[index][i][2], noise_free_testset[index][i][3]
rx[i], ry[i], rz[i] = testset[index][i][1], testset[index][i][2], testset[index][i][3]
rx_est_m[i], ry_est_m[i], rz_est_m[i] = mean(x_est[i])[1], mean(x_est[i])[2], mean(x_est[i])[3]
rx_est_var[i], ry_est_var[i], rz_est_var[i] = var(x_est[i])[1], var(x_est[i])[2], var(x_est[i])[3]
end
p1 = plot(rx,label="Hidden state rx")
p1 = plot!(rx_est_m,label="Inferred states", ribbon=rx_est_var)
p1 = scatter!(first.(testset[index]), label="Observations", markersize=1.0)
p2 = plot(ry,label="Hidden state ry")
p2 = plot!(ry_est_m,label="Inferred states", ribbon=ry_est_var)
p2 = scatter!(getindex.(testset[index], 2), label="Observations", markersize=1.0)
p3 = plot(rz,label="Hidden state rz")
p3 = plot!(rz_est_m,label="Inferred states", ribbon=rz_est_var)
p3 = scatter!(last.(testset[index]), label="Observations", markersize=1.0)
plot(p1, p2, p3, size = (1000, 300))
Prediction
In the above instances, the observations during whole time are available. For prediction task, we can only access to the observations untill $k$ and estimate the future state at time $k+1$, $k+2$, $\dots$,$k+T$.
We can still solve this problem by the trained neural network to approximate the transition matrix. And we can get the one-step prediction in the future. Then, the predicted results are feed into the neural network to generate the transition matrix for the next step, and roll into the future to get the multi-step prediction.
\[\begin{aligned} A_{k}=NN(x_{k}) \\ p(x_{k+1} | x_{k})=\mathcal{N}(x_{k+1} | A_{k}x_{k}, Q) \\ \end{aligned}\]
#Define the prediction function
multiplyGaussian(A,m,V) = (A * m, A * V * transpose(A))
sumGaussians(m1,m2,V1,V2) = (m1 + m2, V1 + V2)
function runForward(A,B,Q,R,mh_old,Vh_old)
mh_1, Vh_1 = multiplyGaussian(A,mh_old,Vh_old)
mh_pred, Vh_pred = sumGaussians(mh_1, zeros(length(mh_old)), Vh_1, Q)
end
function g_predict(mh_old,Vh_old,Q)
neural = NN(W1a,b1a,W2_1a,W2_2a,b2a,s2_1a,W3,b3a)
# Flux.reset!(neural)
As = map((d) -> Matrix(Diagonal(neural.g(d))), [mh_old])
As = As[1]
return runForward(As,B,Q,R,mh_old,Vh_old), As
endg_predict (generic function with 1 method)After $k=75$, the observations are not available, and we predict the future state from $k=76$ to the end
tt = 75
mh = mean(x_est[tt])
Vh = cov(x_est[tt])
mo_list, Vo_list, A_list = [], [], []
inv_Q = inv(Q)
for t=1:100-tt
(mo, Vo), A_t = g_predict(mh,Vh,inv_Q)
push!(mo_list, mo)
push!(Vo_list, Vh)
push!(A_list, A_t)
global mh = mo
global Vh = Vo
end# Prediction visualization
rx, ry, rz = zeros(100), zeros(100), zeros(100)
rx_est_m, ry_est_m, rz_est_m = zeros(100), zeros(100), zeros(100)
rx_est_var, ry_est_var, rz_est_var = zeros(100), zeros(100), zeros(100)
for i=1:tt
rx[i], ry[i], rz[i] = testset[index][i][1], testset[index][i][2], testset[index][i][3]
rx_est_m[i], ry_est_m[i], rz_est_m[i] = mean(x_est[i])[1], mean(x_est[i])[2], mean(x_est[i])[3]
rx_est_var[i], ry_est_var[i], rz_est_var[i] = var(x_est[i])[1], var(x_est[i])[2], var(x_est[i])[3]
end
for i=tt+1:100
ii=i-tt
rx[i], ry[i], rz[i] = testset[index][i][1], testset[index][i][2], testset[index][i][3]
rx_est_m[i], ry_est_m[i], rz_est_m[i] = mo_list[ii][1], mo_list[ii][2], mo_list[ii][3]
rx_est_var[i], ry_est_var[i], rz_est_var[i] = Vo_list[ii][1,1], Vo_list[ii][2,2], Vo_list[ii][3,3]
end
p1 = plot(rx,label="Ground truth rx")
p1 = plot!(rx_est_m,label="Inffered state rx",ribbon=rx_est_var)
p1 = scatter!(first.(testset[index][1:tt]), label="Observations", markersize=1.0)
p2 = plot(ry,label="Ground truth ry")
p2 = plot!(ry_est_m,label="Inferred states", ribbon=ry_est_var)
p2 = scatter!(getindex.(testset[index][1:tt], 2), label="Observations", markersize=1.0)
p3 = plot(rz,label="Ground truth rz")
p3 = plot!(rz_est_m,label="Inferred states", ribbon=rz_est_var)
p3 = scatter!(last.(testset[index][1:tt]), label="Observations", markersize=1.0)
plot(p1, p2, p3, size = (1000, 300),legend=:bottomleft)